
3DCADを含む3Dデータ開発の為のオープンソース Open CASCADE テクノロジーを生産技術に活用するアイディアのご紹介
Open CASCADE テクノロジーは、ソフトウェアで三次元形状を用いた表現、演算、計算を行うためのライブラリです。C++で書かれたライブラリで様々な幾何学的やトポロジカルな操作を提供しています。
OpenGLやVTKなどの他のライブラリと連携して、高品質な3Dビジュアライゼーションやデータ変換を可能にしています。
オープンソース(LGPLライセンス)であり、商用利用も可能です。
[リンク] Open CASCADE テクノロジー(英語のみ)
Open CASCADE テクノロジーの活用方法
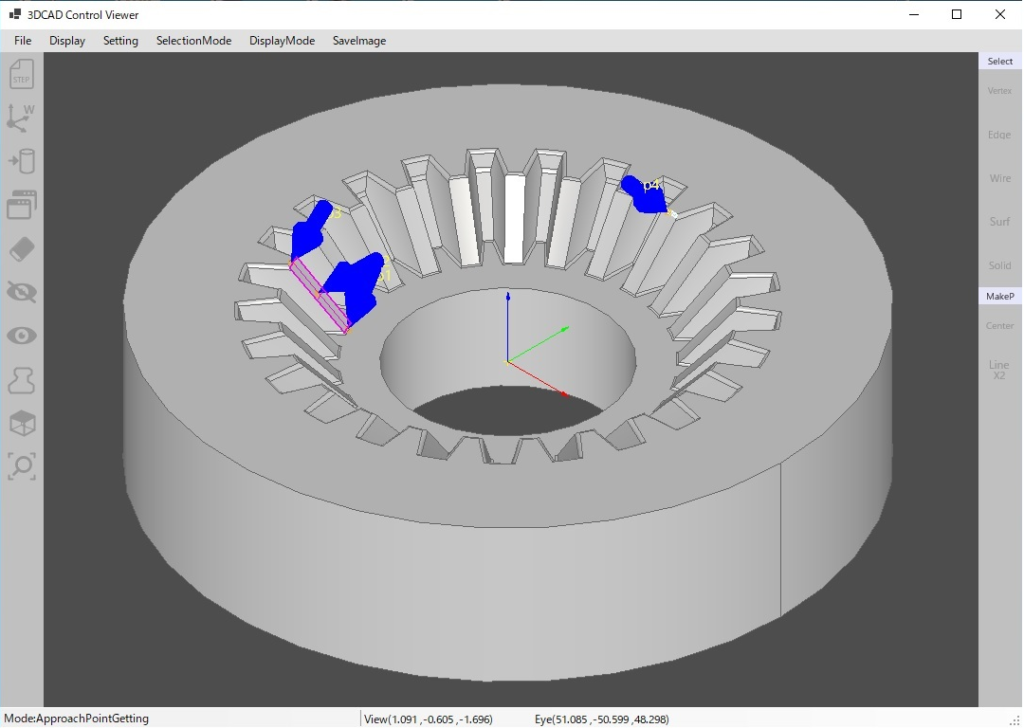
1.ワーク表面上の点の座標、法線ベクトルの取得
例えば、ロボットなどでプローブ測定を行うには接触点の座標と法線ベクトルが必要になります。
本ライブラリでは、形状を構成する要素の情報を容易に取り出せるため、ロボットの座標設定が簡単にできるようになります。
PCで制御可能なロボットでしたら、現場で即時修正が可能になります。
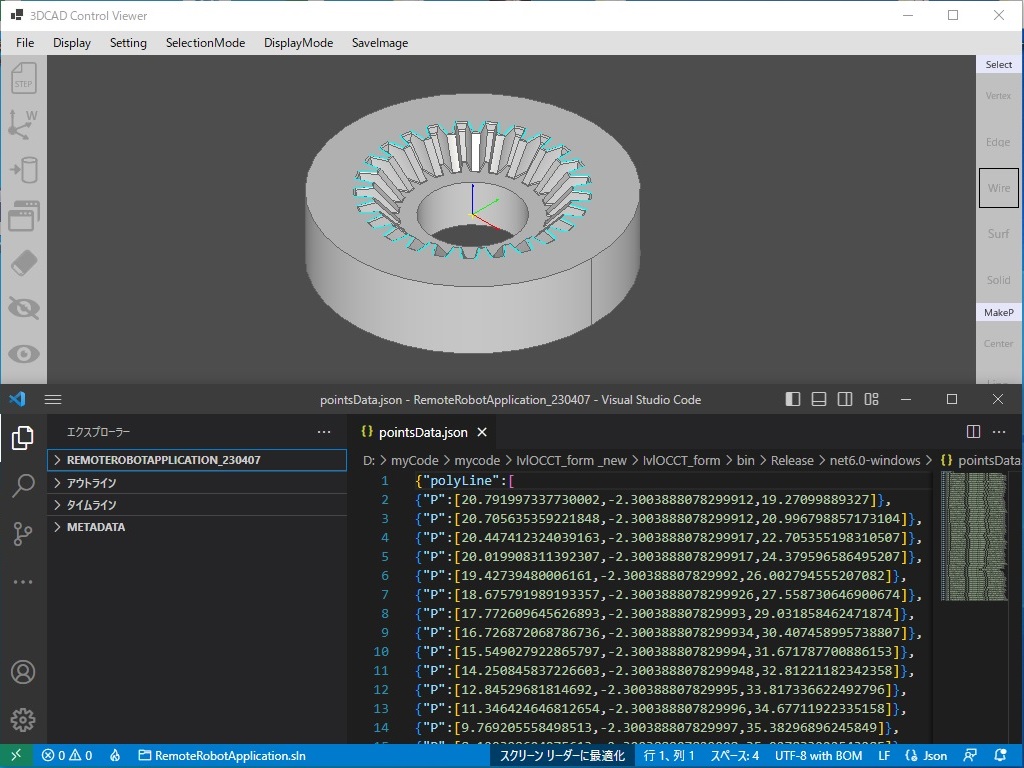
2.ワークの連続エッジ(プロファイル)座標データを取得
Open CASCADEは連続エッジの選択、エッジ上の点の座標を取得する関数もあり、輪郭制御する際の点群の座標取得ができます。
また、輪郭制御の姿勢などの情報は一般的にアプリケーションにより作成されますが、点群の作成と同一プロセスに組み込むことで効率が向上します。
例えば軌跡を微修正させるたびにCADデータを修正しなければならないといった手間を削減できます。
3.ロボット操作のインターフェースとして活用
Open CASCADEのビューワーとロボットの座標系を一致させることで、GUIでのマウス操作からロボットを操作させることもできます。
画像検査ですと、撮像面の角度情報なども取得可能なため、焦点を合致した軌跡で撮像箇所の移動なども容易にできます。
